1. Image and video input
Expansive data I/O tools
2. Annotation & task management
Extensive data management tools
3. Health check
Dataset analysis tools
4. Dataset management
Extensive data management tools
5. Augmentation
Data generation tools to increase yields
6. Parallel on cloud Training
Top of the line hardware available 24/7
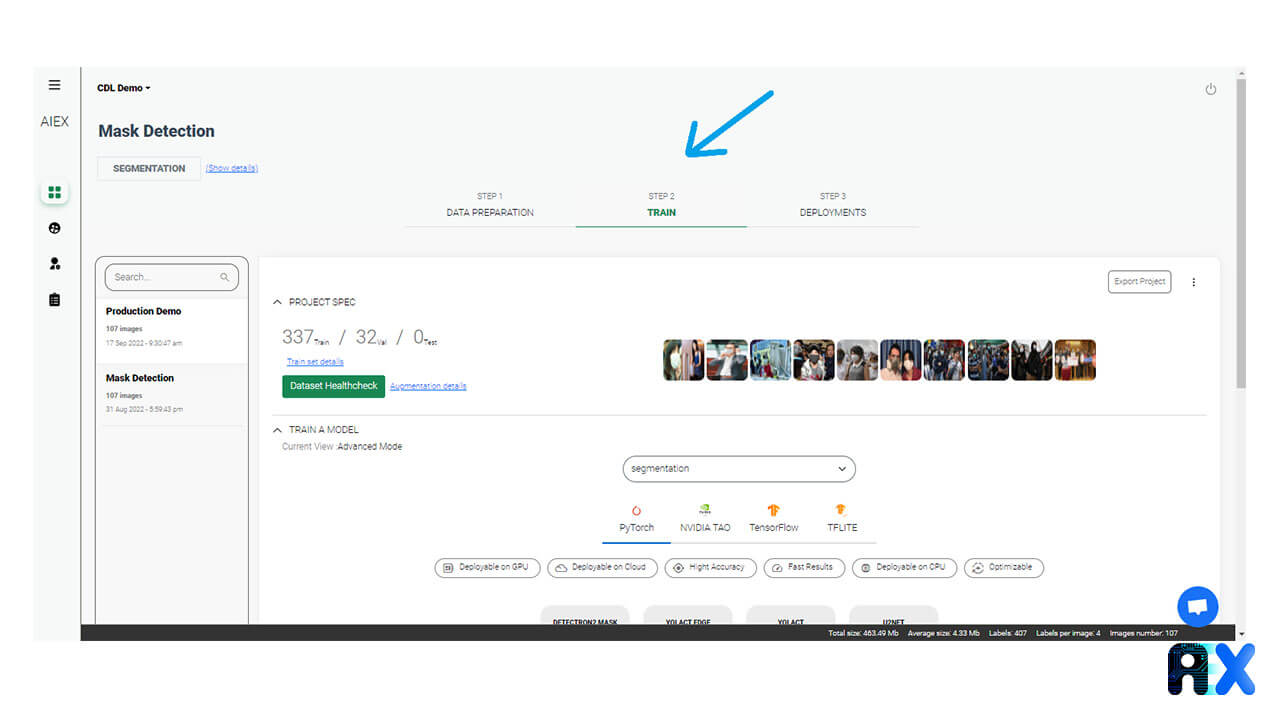
Play VideoHow does AIEX work?
AIEX Deep Learning platform provides you with all the tools necessary for a complete Deep Learning workflow. Everything from data management tools to model traininng and finally deploying the trained models. You can easily transform your visual inspections using the trained models and save on tima and money, increase accuracy and speed.
7. Deployment on cloud inference
High-end hardware for real-time 24/7 inferences
Automotive
transformation in automotive industry
Railway
Discover how AI is helping shape the future
Manufacturing
Cutting edge, 24/7 on premise inspections
Safety & Security
See how AI helps us build safer workspaces
Revolutionary Indsutry Transformation
So far we had 3 industrial revolutions, each reducing reliance on human labor and utilizing unmanned systems more than before, we believe the last major uncharted teritory in unmanned systems is the intelligence sub-systems and that’s the defining point of 4th industrial revolution.Revolutionary Indsutry Transformation
So far we had 3 industrial revolutions, each reducing reliance on human labor and utilizing unmanned systems more than before, we believe the last major uncharted teritory in unmanned systems is the intelligence sub-systems and that’s the defining point of 4th industrial revolution.